From Byzantine Consensus to BFT State Machine Replication:
A Latency-Optimal Transformation
Jo
˜
ao Sousa and Alysson Bessani
University of Lisbon, Faculty of Sciences, LaSIGE
Lisbon, Portugal
Abstract—We present a new algorithm for state machine
replication that is built around a leader-driven consensus
primitive. This algorithm requires only two additional com-
munication steps between replicas and clients if the consensus
leader is correct and the system is synchronous, being thus the
first latency-optimal transformation from Byzantine consensus
to BFT state machine replication. We also discuss how to make
simple modifications to leader-driven consensus algorithms in
order to make them compatible with our transformation.
Keywords-Byzantine fault tolerance; state machine replica-
tion; consensus; modularization.
I. INTRODUCTION
Replication is a fundamental technique for implementing
dependable services that are able to ensure integrity and
availability despite the occurrence of faults and intrusions.
State Machine Replication (SMR) [18], [26] is a popular
replication method that enables a set of replicas (state
machines) to execute the same sequence of operations for a
service even if a fraction of the them are faulty.
A fundamental requirement of SMR is to make all client-
issued requests to be totally ordered across replicas. Such
requirement demands the implementation of a total order
broadcast protocol, which is known to be equivalent the
consensus problem [9], [16], [23]. Therefore, a solution to
the consensus problem is in the core of any distributed SMR
protocol.
In the last decade, many practical SMR protocols for the
Byzantine fault model were published (e.g., [2], [7], [10],
[17], [27], [28]). However, despite their efficiency, such
protocols are monolithic: they do not separate clearly the
consensus primitive from the remaining protocol.
From a theoretical point of view, many Byzantine fault-
tolerant (BFT) total order broadcast protocols (the main
component of a BFT SMR implementation) were built using
black-box Byzantine consensus primitives (e.g., [6], [9],
[16], [23]). This modularity simplifies the protocols, making
them both easy to reason about and to implement. Unfortu-
nately, these modular transformations plus the underlying
consensus they use always require more communication
steps than the aforementioned monolithic solutions.
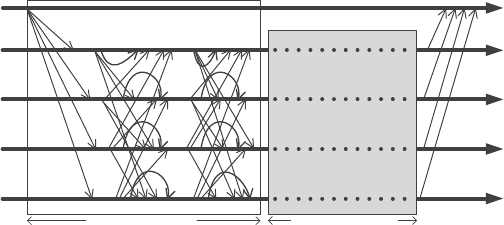
Figure 1 presents the typical message pattern of modular
BFT total order broadcast protocols when used to implement
SMR. The key point of most of these transformations is the
use of BFT reliable broadcast protocol [4] to disseminate
send
readyecho
Consensus
Reliable Broadcast
3 communication steps
3 communication steps
P0
P1
P2
P3
Client
Figure 1. Modular BFT state machine replication message pattern for
a protocol that uses reliable broadcast and a consensus primitives. This
protocol is adapted from [23], when tolerating a single fault.
client requests among replicas, ensuring they will be eventu-
ally proposed (and decided) in some consensus instance that
defines the order of messages to be executed. As illustrated
in Figure 1, the usual BFT reliable broadcast requires three
communication steps [4].
It is known that optimally resilient Byzantine consensus
protocols cannot safely decide a value in two or less com-
munication steps [13], [22]. This means that latency-optimal
protocols for BFT SMR that use only 3f + 1 replicas to
tolerate f Byzantine faults (e.g., PBFT [7]) requires at least
three communication steps for the consensus plus two extra
steps to receive the request from the client and send a reply
1
.
By the other hand, the protocol of Figure 1 requires at least
six communication steps to totally order a message in the
best-case, plus one more to send a reply to the client, making
a total of seven steps.
Considering this gap, in this paper we investigate the
following question: Is it possible to obtain a BFT state
machine replication protocol with an optimal number of
communications steps (similar to PBFT), while explicitly
using a consensus primitive at its core? The main contri-
bution of this work is a new transformation from Byzantine
consensus to BFT state machine replication dubbed Modular
State Machine Replication (MOD-SMART), which answers
this question affirmatively. MOD-SMART implements SMR
1
This excludes optimistic protocols that are very efficient in contention-
free executions [2], [10], speculative protocols [17], protocols that rely on
trusted components [28], and fast protocols that require more than 3f + 1
replicas [22].
using a special Byzantine consensus primitive called Vali-
dated and Provable Consensus (VP-Consensus), which can
be easily obtained by modifying existing leader-driven con-
sensus algorithms (e.g., [5], [20], [22], [25], [29]). To our
knowledge, MOD-SMART is the first modular BFT SMR
protocol built over a well-defined consensus module which
requires only the optimal number of communication steps,
i.e., the number of communication steps of consensus plus
two.
The core of our solution is the definition and use of
the VP-Consensus as a “grey-box” abstraction that allows
the modular implementation of SMR without using reliable
broadcast, thus avoiding the extra communication steps
required to safely guarantee that all requests arrive at all
correct replicas. The monolithic protocols, on the other hand,
avoid those extra steps by merging the reliable broadcast
with the consensus protocol, being thus more complex.
MOD-SMART avoids mixing protocols by using the rich
interface exported by VP-Consensus, that allows it to handle
request timeouts and, if needed, triggers internal consensus
timeouts. The use of a VP-Consensus is a good compromise
between modularity and efficiency, specially because this
primitive can be easily implemented with simple modifica-
tions on several leader-driven partially-synchronous Byzan-
tine consensus protocols [5], [20]–[22], [25], [29].
Although this work main contribution is theoretical, our
motivation is very practical. MOD-SMART is implemented
as one of the core modules of BFT-SMART [1], an open-
source Java-based BFT SMR library in which modularity is
treated as a first-class property.
The paper is organized in the following way. We first
describe our system model and the problem we want to
address in Sections II and III. The Validated and Provable
Consensus primitive is discussed in Section IV. Next, Sec-
tion V present the the MOD-SMART algorithms. Possible
optimizations and additional considerations are discussed in
Section VI. In Sections VII and VIII we put the related work
in context and present our conclusions. Finally, all proofs
that MOD-SMART implements SMR are described in the
Appendix.
II. SYSTEM MODEL
We consider a system composed by a set of n ≥ 3f + 1
replicas R, where a maximum of f replicas may be subject
to Byzantine faults, and a set C with an unbounded (but
finite) number of clients, which can also suffer Byzantine
faults. A process (client or replica) is considered correct
if it never deviates from its specification; otherwise, it is
considered faulty.
Like in PBFT and similar protocols [7], [10], [17], [27],
MOD-SMART does not require synchrony to assure safety.
However, it requires synchrony to provide liveness. This
means that, even in the presence of faults, correct replicas
will never evolve into an inconsistent state; but the execution
of the protocol is guaranteed to terminate only when the
system becomes synchronous. Due to this, we assume an
eventually synchronous system model [14]. In such model,
the system operates asynchronously until some unknown
instant, at which it will become synchronous. At this point,
unknown time bounds for computation and communication
will be respected by the system.
We further assume that all processes communicate
through reliable and authenticated point-to-point channels,
that can be easily implemented over fair links using retrans-
mission and message authentication codes.
Finally, we assume the existence of cryptographic func-
tions that provide digital signatures, message digests, and
message authentication codes (MAC).
III. STATE MACHINE REPLICATION
The state machine replication model was first proposed
in [18], and later generalized in [26]. In this model, an
arbitrary number of client processes issue commands to a set
of replica processes. These replicas implement a stateful ser-
vice that changes its state after processing client commands,
and sends replies to the clients that issued them. The goal
of this technique is to make the state at each replica evolve
in a consistent way, thus making the service completely and
accurately replicated at each replica. In order to achieve this
behavior, it is necessary to satisfy four properties:
1) If any two correct replicas r and r
0
apply operation o
to state s, both r and r
0
will reach state s
0
;
2) Any two correct replicas r and r
0
start with state s
0
;
3) Any two correct replicas r and r
0
execute the same
sequence of operations o
0
, ..., o
i
;
4) Operations from correct clients are always executed.
The first two requirements can be fulfilled without any
distributed protocol, but the following two directly translates
to the implementation of a total order broadcast protocol –
which is equivalent to solving the consensus problem. MOD-
SMART satisfy properties 3 and 4, assuming the existence
of a VP-Consensus primitive and that the service being
replicated respects properties 1 and 2.
IV. VALIDATED AND PROVABLE CONSENSUS
In this section we introduce the concept of Validated and
Provable Consensus (VP-Consensus). By ‘Validated’, we
mean the protocol receives a predicate γ together with the
proposed value – which any decided value must satisfy. By
‘Provable’, we mean that the protocol generates a crypto-
graphic proof Γ that certifies that a value v was decided
in a consensus instance i. More precisely, a VP-Consensus
implementation offers the following interface:
• VP-Propose(i, l, γ, v): proposes a value v in consensus
instance i, with initial leader l and predicate γ;
• VP-Decide(i, v, Γ): triggered when value v with proof
Γ is decided in consensus instance i;
• VP-Timeout(i, l): used to trigger a timeout in the con-
sensus instance i, and appoint a new leader process l.
Three important things should be noted about this inter-
face. First, VP-Consensus assumes a leader-driven protocol,
similar to any Byzantine Paxos consensus. Second, the inter-
face assumes the VP-Consensus implementation can handle
timeouts to change leaders, and a new leader is (locally)
chosen after a timeout. Finally, we implicitly assume that
all correct processes will invoke VP-Propose for an instance
i using the same predicate γ.
Just like usual definitions of consensus [5], [9], [16], VP-
Consensus respects the following properties:
• Termination: Every correct process eventually decides;
• Integrity: No correct process decides twice;
• Agreement: No two correct processes decide differently.
Moreover, two additional properties are also required:
• External Validity: If a correct process decides v, then
γ(v) is true;
• External Provability: If some correct process decides
v with proof Γ in a consensus instance i, all correct
process can verify that v is the decision of i using Γ.
External Validity was originally proposed by Cachin et al.
[6], but we use a slightly modified definition. In particular,
External Validity no longer explicitly demands validation
data for proposing v, because such data is already included
in the proposed value, as will be clear in Section V.
A. Implementation requirements
Even though our primitive offers the classical properties
of consensus, the interface imposes some changes in its
implementation. Notice that we are not trying to specify a
new consensus algorithm; we are only specifying a primitive
that can be obtained by making simple modifications to
existing ones [5], [20]–[22], [25]. However, as described
before, our interface assumes that such algorithms are leader-
driven and assume the partially synchronous system model.
Most Paxos-based protocols satisfy these conditions [5],
[22], [25], [29], and thus can be used with MOD-SMART.
In this section we present an overview of the required
modifications on consensus protocols, without providing
explanations for it. We will come back to the modifications
in Section V-E, when it will become clear why they are
required.
The first change is related to the timers needed in the pres-
ence of partial synchrony. To our knowledge, all published
algorithms for such system model requires a timer to ensure
liveness despite leader failures [5], [19], [22]. The primitive
still needs such timer; but it will not be its responsibility
to manage it. Instead, we invoke VP-Timeout to indicate to
the consensus that a timeout has occurred, and it needs to
handle it.
The second change is related to the assumption of a
leader-driven consensus. To our knowledge, all the leader-
driven algorithms in literature have deterministic mecha-
nisms to select a new leader when sufficiently many of them
suspect the current one. These suspicions are triggered by
a timeout. A VP-Consensus implementation still requires
the election of a new leader upon a timeout. However,
the next leader will be defined by MOD-SMART, and is
passed as an argument in the VP-Propose and VP-Timeout
calls. Notice that these two requirements are equivalent to
assuming the consensus protocol requires a leader election
module, just like Ω failure detector, which is already used
in some algorithms [5], [22].
The third change imposes the consensus algorithm to
generate the cryptographic proof Γ to fulfill the External
Provability property. This proof can be generated by signing
the messages that can trigger a decision of the consensus
2
.
An example of proofs would be a set of 2f + 1 signed
COMMIT messages in PBFT [7] or d(n + f + 1)/2e signed
COMMITPROOF messages in Parametrized FaB [22].
Finally, we require each correct process running the
consensus algorithm to verify if the value being proposed by
the leader satisfies γ before it is accepted. Correct processes
must only accept values that satisfy such predicate and
discard others – thus fulfilling the External Validity property.
V. THE MOD-SMART ALGORITHM
In this section we describe MOD-SMART, our modular
BFT state machine replication algorithm. The protocol is
divided into three sub-algorithms: client operation, normal
phase, and synchronization phase. The proofs that MOD-
SMART satisfies the BFT state machine replication proper-
ties under our system model are presented in the Appendix.
A. Overview
The general architecture of a replica is described in Figure
2. MOD-SMART is built on top of a reliable and authen-
ticated point-to-point communication substrate and a VP-
Consensus implementation. Such module may also use the
same communication support to exchange messages among
processes. MOD-SMART uses VP-Consensus to execute a
sequence of consensus instances, where in each instance i a
batch of operations are proposed for execution, and the same
proposed batch is decided on each correct replica. This is
the mechanism by which we are able to achieve total order
across correct replicas.
During normal phase, a log of the decided values is con-
structed based on the sequence of VP-Consensus executions.
Each log entry contains the decided value, the id of the
consensus instance where it was decided, and its associated
proof. To simplify our design, MOD-SMART assumes each
correct replica can execute concurrently only the current
instance i and previous consensus instance i −1. All correct
2
Due to the cost of producing digital signatures, the cryptographic proof
can be generated with MAC vectors instead of digital signatures, just like
in PBFT [7].

VP-Consensus
Reliable and Authenticated
Channels
Mod-SMaRt
Figure 2. MOD-SMART replica architecture. The reliable and authen-
ticated channels layer guarantee the delivery of point-to-point messages,
while the VP-Consensus module is used to establish agreement on the
message(s) to be delivered in an consensus instance.
replicas remain available to participate in consensus instance
i−1, even if they are already executing i. This is required to
ensure that if there is one correct replica running consensus
i − 1 but not i, there will be at least n − f correct replicas
executing i − 1, which ensures the delayed replica will be
able to finish i − 1.
Due to the asynchrony of the system, it is possible that
a replica receives messages for a consensus instance j such
that j > i (early message) or j < i − 1 (outdated message).
Early messages are stored in an out-of-context buffer for
future processing while outdated messages are discarded. We
do not provide pseudo-code for this mechanism, relying on
our communication layer to deliver messages in accordance
with the consensus instances being executed.
This pretty much describes the normal phase of the
protocol, which is executed in the absence of faults and in
the presence of synchrony. When these conditions are not
satisfied, the synchronization phase might be triggered.
MOD-SMART makes use of the concept of regencies.
This is equivalent to the view mechanism employed by PBFT
and ViewStamped Replication [7], [24], where a single
replica will be assigned as the leader for each regency.
Such leader will be needed both in MOD-SMART, and
in the VP-Consensus module. During each regency, the
normal case operation can be repeated infinitely; during a
synchronization phase, an unbounded (but finite) number
of regency changes can take place, since the system will
eventually become synchronous.
The avoidance of executing a reliable multicast before
starting the Byzantine consensus may lead to two problems.
First, a faulty leader may not propose messages from some
client for ordering, making it starve. Second, a faulty client
can send messages to all replicas but to the current (correct)
leader, making other replicas suspect it for not ordering
messages from this client. The solution for these problems
is to suspect the leader only if the timer associated with
a message expires twice, making processes forward the
pending message to the leader upon the first expiration.
In case a regency change is needed (i.e., the leader is
suspected), timeouts will be triggered at all replicas and the
synchronization phase will take place. During this phase,
MOD-SMART must ensure three properties: (1) a quorum
of n − f replicas must have the pending messages that
caused the timeouts; (2) correct replicas must exchange logs
to jump to the same consensus instance; and (3) a timeout is
triggered in this consensus, proposing the same leader at all
correct replicas (the one chosen during the regency change).
Notice that MOD-SMART does not verify consensus values
to ensure consistency: all these checks are done inside of the
VP-Consensus module, after its timeout is triggered. This
substantially simplifies faulty leader recovery by breaking
the problem in two self-contained blocks: the state machine
replication layer ensures all processes are executing the same
consensus with the same leader while VP-Consensus deals
with the inconsistencies within a consensus.
B. Client Operation
Algorithm 1 describes how the client invokes an operation
in MOD-SMART. When a client wants to issue a request
to the replicas, it sends a REQUEST message in the
format specified (line 6). This message contains the sequence
number for the request and the command issued by the
client. The inclusion of a sequence number is meant to
uniquely identify the command (together with the client id),
and prevent replay attacks made by an adversary that might
be sniffing the communication channel. A digital signature
α
c
is appended to the message to prove that such message
was produced by client c. Although this signature is not
required, its use makes the system resilient against certain
attacks [3], [8].
The client waits for at least f + 1 matching replies from
different replicas, for the same sequence number (lines 9–
11), and return the operation result.
Algorithm 1: Client-side protocol for client c.
1 Upon Init do
2 nextSeq = 0
3 Replies ← ∅
4 Upon Invoke(op) do
5 nextSeq = nextSeq + 1
6 send hREQUEST, nextSeq, opi
α
c
to R
7 Upon reception of hREPLY, seq, repi from r ∈ R do
8 Replies ← Replies ∪ {hr, seq, repi}
9 if ∃ seq, rep : |{h∗, seq, repi ∈ Replies}| > f
10 Replies ← Replies\{h∗, seq, repi}
11 return rep
C. Normal Phase
The normal phase is described in Algorithm 2, and its
message pattern is illustrated in Figure 3. The goal of this
phase is to execute a sequence of consensus instances in
each replica. The values proposed by each replica will be

a batch of operations issued by the clients. Because each
correct replica executes the same sequence of consensus
instances, the values decided in each instance will be the
same in all correct replicas, and since they are batches
of operations, they will be totally ordered across correct
replicas. All variables and functions used by the replicas in
Algorithms 2 and 3 are described in Table I.
Reception of client requests are processed in line 1-2
through procedure RequestReceived (lines 20–24). Requests
are only considered by correct replicas if the message
contains a valid signature and the sequence number expected
from this client (to avoid replay attacks), as checked in line
21. If a replica accepts an operation issued by a client, it
stores it in the ToOrder set, activating a timer associated
with the request (lines 22–24). Notice that a message is also
accepted if it is forwarded by other replicas (lines 18-19).
VP-Consensus
Client
R0
R1
R2
R3
VP-Propose VP-Decide
Figure 3. Communication pattern of MOD-SMART normal phase for
f = 1. A correct client send an operation to all replicas, a consensus
instance is executed to establish total order, the operation is executed, and
a reply is sent to the client.
When the ToOrder set contains some request to be or-
dered, there is no consensus being executed and the ordering
of messages is not stopped (see next section), a sub-set of
operations Batch from ToOrder is selected to be ordered
(lines 3 and 4). The predicate fair ensures that all clients
with pending requests will have approximately the same
number of operations in a batch to avoid starvation. The
replica will then create a consensus instance, using Batch
as the proposed value (lines 5 and 6). The predicate γ given
as an argument in VP-Propose should return TRUE for a
proposed value V if the following three conditions are met:
1) fair (V ) is TRUE (thus V is not an empty set);
2) Each message in V is either in the ToOrder set of
the replica or is correctly signed and contains the next
sequence number expected from the client that issued
the operation;
3) Each message in V contains a valid command with
respect to the service implemented by MOD-SMART.
When a consensus instance decides a value (i.e., a batch
of operations) and produces its corresponding proof (line
7), MOD-SMART will: store the batch of operations and
its cryptographic proof in each replica log (line 11); cancel
the timers associated with each decided request (line 14);
deterministically deliver each operation contained in the
batch to the application (line 16); and send a reply to the
client that requested the operation with the corresponding
response (line 17). Notice that if the algorithm is stopped
(possibly because the replica is running a synchronization
phase, see next section), decided messages are stored in a
Decided set (lines 8 and 9), instead of being executed.
Algorithm 2: Normal phase at replica r.
1 Upon reception of m = hREQUEST, seq, opiα
c
from c ∈ C do
2 RequestReceived (m)
3 Upon (toOrder 6= ∅) ∧ (currentCons = −1) ∧ (¬stopped) do
4 Batch ← X ⊆ ToOrder : |X| ≤ maxBatch ∧ fair(X)
5 currentCons ← hCons(DecLog).i + 1
6 VP-Propose (currentCons, creg mod R, γ, Batch)
7 Upon VP-Decidehi, Batch, Proof i do
8 if stopped
9 Decided ← Decided ∪ {hi, Batch, Proof i}
10 else
11 DecLog ← DecLog ∪ {hi, Batch, Proof i}
12 if currentCons = i then currentCons ← −1
// Deterministic cycle
13 foreach m = hREQUEST, seq, opi
α
c
∈ Batch do
14 cancelTimers ({m})
15 ToOrder ← ToOrder \{m}
16 rep ← execute(op)
17 send hREPLY, seq, repi to c
18 Upon reception of hFORWARDED, M i from r
0
∈ R do
19 ∀m ∈ M : RequestReceived (m)
20 Procedure RequestReceived(m)
21 if lastSeq[c] + 1 = m.seq ∧ validSig(m)
22 ToOrder ← ToOrder ∪ {m}
23 if ¬stopped then activateTimers({m}, timeout)
24 lastSeq[c] ← m.seq
D. Synchronization Phase
The synchronization phase is described in Algorithm 3,
and its message pattern is illustrated in Figure 4. This phase
aims to perform a regency change and force correct replicas
to synchronize their states and go to the same consensus
instance. It occurs when the system is passing through a
period of asynchrony, or there is a faulty leader that does not
deliver client requests before their associated timers expire.
This phase is started when a timeout event is triggered for
a sub-set M of pending messages in ToOrder (line 1).
When the timers associated with a set of requests M are
triggered for the first time, the requests are forwarded to all
replicas (lines 2 and 3). This is done because a faulty client
may have sent its operation only to some of the replicas,
therefore starting a consensus in less than n − f of them
(which is not sufficient to ensure progress, and therefore
will cause a timeout in these replicas). This step forces such
requests to reach all correct replicas, without forcing a leader
change.
If there is a second timeout for the same request, the
replica starts a regency change (line 4). When a regency

Table I
VARIABLES AND FUNCTIONS USED IN ALGORITHMS 2 AND 3.
Variables
Name Initial Value Description
timeout INITIAL TIMEOUT Timeout for a message to be ordered.
maxBatch MAX BATCH Maximum number of operations that a batch may contain.
creg 0 Replica current regency.
nreg 0 Replica next regency.
currentCons -1 Current consensus being executed.
DecLog ∅ Log of all decided consensus instances and their proofs.
ToOrder ∅ Pending messages to be ordered.
Tmp ∅ Messages collected in a STOP messages.
Decided ∅ Decision values obtained during the synchronization phase.
stopped FALSE Indicates if the synchronization phase is activated.
lastSeq [1..∞] ∀c ∈ C : lastSeq[c] ← 0 Last request sequence number used by each client c.
ChangeReg[1..∞] ∀g ∈ N : ChangeReg[g] ← ∅ Replicas that want a change to regency g.
Data[1..∞] ∀g ∈ N : Data[g] ← ∅ Signed STOPDATA messages collected by the leader during change to regency g.
Sync[1..∞] ∀g ∈ N : Sync[g] ← ∅ Set of Logs sent by the leader to all replicas during regency change g.
Functions
Interface Description
activateTimers(Reqs, timeout) Creates a timer for each request in Reqs with value timeout.
cancelTimers(Reqs) Cancels the timer associated with each request in Reqs.
execute(op) Makes the application execute operation op, returning the result.
validSig(req) Returns TRUE if request eq is correctly signed.
noGaps(Log) Returns TRUE if sequence of consensus Log does not contain any gaps.
validDec(decision) Returns TRUE if decision contains a valid proof.
hCons(Log) Returns the consensus instance from Log with highest id.
hLog(Logs) Returns the largest log contained in Logs.
change begins in a replica, the processing of decisions is
stopped (line 7), the timers for all pending requests are
canceled (line 9) and a STOP message is sent to all replicas
(line 10). This message informs other replicas that a timeout
for a given set of requests has occurred. When a replica
receives more than f STOP messages requesting the next
regency to be started (line 15), it begins to change its current
regency using the valid messages in Tmp (line 16). This
procedure ensures that a correct replica starts a view change
as soon as it knows that at least one correct replica started
it, even if no timeout was triggered locally.
When a replica receives more than 2f STOP messages, it
will install the next regency (lines 19 and 20). It is necessary
to wait at least 2f +1 messages to make sure that eventually
all correct replicas will install the next regency. Following
this, the timers for all operations in the ToOrder set will be
re-activated and a new leader will be elected (lines 21–23).
After the next regency is installed, it is necessary to force
all replicas to go to the same state (i.e., synchronize their
logs and execute the logged requests) and, if necessary,
start the consensus instance. To accomplish this, all replicas
send a STOPDATA message to the new regency leader,
providing it with their decision log (line 23). As long as
the proof associated with each decided value is valid and
there is no consensus instance missing, the leader will collect
these messages (lines 26 and 27). This is necessary because
it proves that each consensus instances has decided some
batch of operations (which will be important later). When
at least n − f valid STOPDATA messages are received
by the leader, it will send a SYNC message to all replicas,
containing all the information gathered about their decided
instances in at least n − f replicas (lines 28 and 29).
Client
R0
R1
R2
R3
STOP
STOP-DATA
SYNC
VP-Consensus VP-Consensus
READ COLLECT PROPOSE
TIMEOUT
TIMEOUT
VP-TIMEOUT VP-DECIDE
TIMEOUT
TIMEOUT
Figure 4. Communication steps of synchronization phase for f = 1.
This phase is started when the timeout for a message is triggered for
a second time, and can run simultaneously with VP-Consensus. Dashed
arrows correspond to messages of the VP-Consensus protocol.
When a replica receives a SYNC message, it executes
the same computations performed by the leader (lines 31–
35) to verify if the leader has gathered and sent valid
information. If the leader is correct, after receiving the same
SYNC message, all correct replicas will choose the same
highest log (line 36) and resume decision processing (line
37). All correct replicas will evolve into the same state
as they deliver the value of each consensus instance that
was already decided in other replicas (lines 40 and 41) and
either trigger a timeout in the VP-Consensus being executed
(line 42 and 43) or make everything ready to start a new
consensus instance (line 44).
E. Reasoning about the Consensus Modifications
As we mentioned in Section IV-A, the VP-Consensus
primitive does not need to start and stop timers, since our
state machine algorithm already does that. Due to this, the
VP-Consensus module only needs to be notified by the state

Algorithm 3: Synchronization phase at replica r.
1 Upon timeout for requests M do
2 M
first
← {m ∈ M : first timeout of m}
3 if M
first
6= ∅ then send hFORWARDED, M i to R
4 else if M\M
first
6= ∅ then StartRegChange (M \M
first
)
5 Procedure StartRegChange(M)
6 if nreg = creg
7 stopped ← TRUE
8 nreg ← creg + 1
9 cancelTimers(ToOrder ) // Cancel all timers
10 send hSTOP, nreg, Mi to R
11 Upon reception of hSTOP, reg, Mi from r
0
∈ R do
12 if reg = creg + 1
13 T mp ← T mp ∪ M
14 ChangeReg[reg] ← ChangeReg[reg] ∪ {r
0
}
15 if |ChangeReg[reg]| > f
16 M
0
← {m ∈ T mp : m.seq > lastSeq[m.c]∧
validSig(m)}
17 StartRegChange (M
0
)
18 ToOrder ← ToOrder ∪ M
0
19 if |ChangeReg[reg]| > 2f ∧ nreg > creg
20 creg ← nreg
21 activateTimers (ToOrder , timeout)
22 leader ← creg mod n
23 send hSTOPDATA, reg, DecLogi
α
r
to leader
24 Upon recept. of m = hSTOPDATA, creg, Logi
α
r
0
from r
0
∈ R do
25 if creg mod n = r
26 if (noGaps(Log)) ∧ (∀d ∈ Log : validDec(d))
27 Data[creg] ← Data[creg] ∪ {m}
28 if |Data[creg]| ≥ n − f
29 send hSYNC, creg, Data[creg]i to R
30 Upon reception of hSYNC, creg, Proofsi from r
0
∈ R do
31 if (nreg = creg) ∧ (creg mod n = r
0
) ∧ ProofCons[creg] = ∅
32 foreach hSTOPDATA, creg, Logi
α
r
00
∈ Proofs do
33 if (noGaps(Log)) ∧ (∀d ∈ Log : validDec(d))
34 Sync[creg] ← Sync[creg] ∪ {hr
00
, Logi}
35 if |Sync[creg]| ≥ n − f
36 Log ← hLog(Sync[creg] ∪ {hr, DecLogi}) ∪ Decided
37 stopped ← FALSE
38 Decided ← ∅
39 T mp ← ∅
// Deterministic cycle
40 foreach hi
0
, B, P i ∈ Log : i
0
> hCons(DecLog).i do
41 Trigger VP-Decidehi
0
, B, P i
42 if currentCons = hCons(Log).i + 1
43 VP-Timeout (currentCons, creg mod R)
44 else currentCons = −1
machine algorithm when it needs to handle a timeout. This
is done by invoking VP-Timeout for a consensus i, at the
end of a synchronization phase (line 43 of Algorithm 3).
The VP-Timeout operation also receives as an argument the
new leader the replica should rely on. This is needed because
we assume a leader-driven consensus, and such algorithms
tend to elect the leader in a coordinated manner. But when a
delayed replica jumps from an old consensus to a consensus
i during the synchronization phase, it will be out-of-sync
with respect to the current regency, when compared with
the majority of replicas that have already started consensus
i during the normal phase. For this reason, we need to
explicitly inform VP-Consensus about the new leader.
Let us now discuss why the External Validity is required
for MOD-SMART. The classic Validity property would be
sufficient in the crash fault model, because processes are
assumed to fail only by stopping, and will not propose
invalid values; however, in the Byzantine fault model such
behavior is permitted. A faulty process may propose an
invalid value, and such value might be decided. An example
of such value can be an empty batch. This is a case that
can prevent progress within the algorithm. By forcing the
consensus primitive to decide a value that is useful for the
algorithm to keep making progress, we can prevent such
scenario from occurring, and guarantee liveness as long as
the execution is synchronous.
Finally, it should now be clear why the External Prov-
ability property is necessary: in the Byzantine fault model,
replicas can lie about which consensus instance they have ac-
tually finished executing, and also provide a fake/corrupted
decision value if a synchronization phase is triggered. By
forcing the consensus primitive to provide a proof, we can
prevent faulty replicas from lying. The worst thing a faulty
replica can do is to send old proofs from previous consensus.
However, since MOD-SMART requires at least n − f logs
from different replicas, there will be always more than f
up-to-date correct replicas that will provide their most recent
consensus decision.
VI. OPTIMIZATIONS
In this section we discuss a set of optimizations for
efficient MOD-SMART implementation. The first important
optimization is related with bounding the size of the decision
log. In MOD-SMART, such log can grow indefinitely, mak-
ing it inappropriate for real systems. To avoid this behavior
we propose the use of checkpoints and state transfer. Check-
points would be performed periodically in each replica:
after some number D of decisions are delivered, the replica
request the state from the application, save it in memory
or disk, and clear the log up to this point
3
. If in the end
of a synchronization phase a replica detects a gap between
the latest decision of its own log, and the latest decision of
the log it chose, it invokes a state transfer protocol. Such
protocol would request from the other replicas the state that
was saved in their latest checkpoint. Upon the reception of
f + 1 matching states from different replicas, the protocol
would force the application to install the new state, and
resume execution.
The second optimization aims to avoid the computational
cost of generating and verifying digital signatures in the
protocol critical path: client requests and VP-Consensus
proofs (to satisfy External Provability) can be signed using
MAC vectors instead of digital signatures, as done in PBFT.
3
Notice that, differently from the PBFT checkpoint protocol [7], MOD-
SMART checkpoints are local operations.
However, in the case of client requests, this results in a less
robust state machine implementation vulnerable to certain
performance degradation attacks [3], [8].
If we use VP-Consensus based on a Byzantine consen-
sus algorithm matching the generalization given in [20],
and employ the optimizations just described, MOD-SMART
matches the message pattern of PBFT in synchronous ex-
ecutions with correct leaders, requiring thus same number
of communication steps and cryptographic operations. This
is exactly what was done in BFT-SMART [1], an imple-
mentation of optimized MOD-SMART using the Byzantine
consensus protocol described in [5].
VII. RELATED WORK
Byzantine Fault Tolerance has gained wide-spread interest
among the research community ever since Castro and Liskov
showed that state machine replication can be practically
accomplished for such fault model [7]. Their algorithm,
best known as PBFT (Practical Byzantine Fault Tolerance)
requires 3f + 1 replicas to tolerate f Byzantine faults and
is live under the partial synchronous system model [14] (no
synchrony is needed for safety). PBFT is considered the
baseline for all BFT protocols published afterwards.
One of the protocols published following PBFT was
Query/Update (Q/U) [2], an optimistic quorum-based pro-
tocol that presents better throughput with larger number
of replicas than other agreement-based protocols. However,
given its optimistic nature, Q/U performs poorly under
contention, and requires 5f + 1 replicas. To overcome these
drawbacks, Cowling et al. proposed HQ [10], a hybrid
Byzantine fault-tolerant SMR protocol similar to Q/U in the
absence of contention. However, unlike Q/U, HQ only re-
quires 3f +1 replicas and relies on PBFT to resolve conflicts
when contention among clients is detected. Following Q/U
and HQ, Kotla et al. proposed Zyzzyva [17], a speculative
Byzantine fault tolerant protocol, which is considered to
be one of the fastest BFT protocol up to date. It is worth
noticing that all these protocols tend to be more efficient
than PBFT because they avoid the complete execution of a
consensus protocol in the expected normal case, relying on
it only to solve exceptional cases.
Guerraoui et al. [15] proposed a well-defined modular
abstraction unifying the optimizations proposed by previous
protocols through composition, making it easy to design new
protocols that are optimal in well-behaved executions (e.g.,
synchrony, absence of contention, no faults), but revert to
PBFT if such nice behavior does not hold. However, the
modularity proposed is at state machine replication level,
in the sense that each module provides a way to totally
order client requests under certain conditions, and does not
suggest any clear separation between total order broadcast
and consensus.
The relationship between total order broadcast and con-
sensus for the Byzantine fault model is studied in many
papers. Cachin et al. [6] show how to obtain total order
broadcast from consensus provided that the latter satisfy the
External Validity property, as needed with MOD-SMART.
Their transformation requires an echo broadcast plus public-
key signature, adding thus at least two communication steps
(plus the cryptography delay) to the consensus protocol. Cor-
reia et al. [9] proposed a similar reduction without relying
on public-key signatures, but using a reliable broadcast and
a multi-valued consensus that satisfies a validity property
different from Cachin’s. The resulting transformation adds
at least three communication steps to the consensus protocol
in the best case. In a very recent paper, Milosevic et
al. [23] take in consideration many variants of the Byzantine
consensus Validity property proposed in the literature, and
show which of them are sufficient to implement total order
broadcast. They also prove that if a consensus primitive
satisfy the Validity property proposed in [11], then it is
possible to obtain a reduction of total order broadcast to
consensus with constant time complexity – which is not the
case of the previous reductions in [6], [9]. However, their
transformation still requires a reliable broadcast, and thus
adds at least three communication steps to the consensus
protocol. Doudou et al. [12] show how to implement BFT
total order broadcast with a weak interactive consistency
(WIC) primitive, in which the decision comprises a vector of
proposed values, in a similar way to a vector consensus (see,
e.g., [9]). They argue that the WIC primitive offers better
guarantees than a Byzantine consensus primitive, eliminating
the issue of the Validity property of consensus. The overhead
of this transformation is similar to [6]: echo broadcast plus
public-key signature.
All these works provide reductions from total order
broadcast to Byzantine consensus by constructing a protocol
stack that does not take into account the implementation of
the consensus primitive; they only specify which properties
such primitive should offer — in particular, they require
some strong variant of the Validity property. MOD-SMART
requires both a specific kind of Validity property, as well
as a richer interface, as defined by our VP-Consensus
abstraction. The result is a transformation that adds at most
one communication step to implement total order broadcast,
thus matching the number of communication steps of PBFT
at the cost of using such gray-box consensus abstraction.
There are many works dedicated to generalize the algo-
rithms of consensus. Lampson proposed an abstract Paxos
algorithm, from which several other versions of Paxos can
be derived (e.g., Byzantine, classic, and disk paxos) [20].
Another generalization of Paxos-style protocols is presented
in [21], where the protocol is reduced to a write-once register
satisfying a special set properties. Implementations of such
register are given for different system and failures models.
R
¨
utti et al. extends these works in [25], where they propose
a more generic construction than in [20], and identify three
classes of consensus algorithms. Finally, Cachin proposes
a simple and elegant modular decomposition of Paxos-like
protocols [5] and show how to obtain implementations of
consensus tolerating crash or Byzantine faults based in the
factored modules. All these works aim to modularize Paxos
either for implementing consensus [5], [21], [25] or state
machine replication [20] under different assumptions; our
work, on the other hand, aims at using a special kind of
consensus to obtain a BFT state machine replication.
VIII. CONCLUSION
Despite the existence of several works providing efficient
BFT state machine replication, none of them encapsulate the
agreement within a consensus primitive, being thus mono-
lithic. On the other hand, all published modular protocol
stacks implementing BFT total order broadcast from Byzan-
tine consensus require a number of communication steps
greater than all practical BFT SMR. We bridge this gap by
presenting MOD-SMART, a latency- and resiliency-optimal
BFT state machine replication algorithm that achieves mod-
ularity using a well-defined consensus primitive. To achieve
such optimality, we introduce the Validated and Provable
Consensus abstraction, which can be implemented by mak-
ing simple modifications on existing consensus protocols.
The protocol here presented is currently in use in BFT-
SMART, an open-source BFT SMR library [1].
Acknowledgments: We warmly thank Bruno Vavala,
Jo
˜
ao Craveiro, Pedro Costa and the EDCC’12 anonymous
reviewers for their feedback on early versions of this paper.
This work was partially supported by the EC through project
TCLOUDS (FP7/2007-2013, ICT-257243) and also by FCT
through project ReD (PTDC/EIA-EIA/109044/2008) and the
Multiannual (LaSIGE) and CMU-Portugal Programmes.
REFERENCES
[1] BFT-SMaRt: High-performance byzantine fault-tolerant state
machine replication. http://code.google.com/p/bft-smart/.
[2] M. Abd-El-Malek, G. Ganger, G. Goodson, M. Reiter, and
J. Wylie. Fault-scalable Byzantine fault-tolerant services. In
Proc. of the 20th ACM Symp. on Operating Systems Principles
- SOSP’05, 2005.
[3] Y. Amir, B. Coan, J. Kirsch, and J. Lane. Byzantine replica-
tion under attack. In Proc. of the Int. Conf. on Dependable
Systems and Networks – DSN’08, 2008.
[4] G. Bracha. An asynchronous b(n − 1)/3c-resilient consensus
protocol. In Proc. of the 3rd Annual ACM Symp. on Principles
of Distributed Computing - PODC’84, 1984.
[5] C. Cachin. Yet another visit to Paxos. Technical report, IBM
Research Zurich, 2009.
[6] C. Cachin, K. Kursawe, F. Petzold, and V. Shoup. Secure and
efficient asynchronous broadcast protocols. In Proc. of the
21st Annual Int. Cryptology Conf. on Advances in Cryptology
– CRYPTO’01, 2001.
[7] M. Castro and B. Liskov. Practical Byzantine fault-tolerance
and proactive recovery. ACM Transactions Computer Systems,
20(4):398–461, 2002.
[8] A. Clement, E. Wong, L. Alvisi, M. Dahlin, and M. Marchetti.
Making Byzantine fault tolerant systems tolerate Byzantine
faults. In Proc. of the 6th USENIX Symp. on Networked
Systems Design & Implementation – NSDI’09, 2009.
[9] M. Correia, N. F. Neves, and P. Ver
´
ıssimo. From consensus
to atomic broadcast: Time-free Byzantine-resistant protocols
without signatures. The Computer Journal, 49(1):82–96,
2006.
[10] J. Cowling, D. Myers, B. Liskov, R. Rodrigues, and L. Shrira.
HQ-Replication: A hybrid quorum protocol for Byzantine
fault tolerance. In Proc. of 7th Symp. on Operating Systems
Design and Implementation - OSDI’06, 2006.
[11] D. Dolev and E. N. Hoch. Constant-space localized Byzantine
consensus. In Proc. of the 22nd Int. Symp. on Distributed
Computing – DISC ’08, 2008.
[12] A. Doudou, B. Garbinato, and R. Guerraoui. Dependable
Computing Systems Paradigms, Performance Issues, and Ap-
plications, chapter Tolerating Arbitrary Failures with State
Machine Replication, pages 27–56. Wiley, 2005.
[13] P. Dutta, R. Guerraoui, and M. Vukoli
´
c. Best-case complexity
of asynchronous Byzantine consensus. Technical report,
School of Computer and Comm. Sciences, EPFL, 2005.
[14] C. Dwork, N. A. Lynch, and L. Stockmeyer. Consensus
in the presence of partial synchrony. Journal of the ACM,
35(2):288–322, 1988.
[15] R. Guerraoui, N. Kne
ˇ
zevi
´
c, V. Qu
´
ema, and M. Vukoli
´
c. The
next 700 BFT protocols. In Proc. of the 5th European Conf.
on Computer systems – EuroSys’10, 2010.
[16] V. Hadzilacos and S. Toueg. A modular approach to fault-
tolerant broadcasts and related problems. Technical report,
Cornell University, 1994.
[17] R. Kotla, L. Alvisi, M. Dahlin, A. Clement, and E. Wong.
Zyzzyva: Speculative Byzantine fault tolerance. In Proc.
of the 21st ACM Symp. on Operating Systems Principles -
SOSP’07, 2007.
[18] L. Lamport. Time, clocks, and the ordering of events in a
distributed system. Communications of the ACM, 21(7):558–
565, 1978.
[19] L. Lamport. The part-time parliament. ACM Transactions
Computer Systems, 16(2):133–169, 1998.
[20] B. Lampson. The ABCD’s of Paxos. In Proc. of the 20th
Annual ACM Symp. on Principles of Distributed Computing
– PODC’01, 2001.
[21] H. C. Li, A. Clement, A. S. Aiyer, and L. Alvisi. The Paxos
register. In Proc. of the 26th IEEE Int. Symp. on Reliable
Distributed Systems - SRDS’07, 2007.
[22] J.-P. Martin and L. Alvisi. Fast Byzantine consensus. IEEE
Trans. on Dependable and Secure Computing, 3(3):202–215,
2006.
[23] Z. Milosevic, M. Hutle, and A. Schiper. On the reduction of
atomic broadcast to consensus with Byzantine faults. In Proc.
of the 30th IEEE Int. Symp. on Reliable Distributed Systems
– SRDS’11, 2011.
[24] B. M. Oki and B. Liskov. Viewstamped replication: A new
primary copy method to support highly-available distributed
systems. In Proc. of the 7th Annual ACM Symp. on Principles
of Distributed Computing – PODC’88, 1988.
[25] O. R
¨
utti, Z. Milosevic, and A. Schiper. Generic construction
of consensus algorithms for benign and Byzantine faults. In
Proc. of the Int. Conf. on Dependable Systems and Networks
- DSN’10, 2010.
[26] F. B. Schneider. Implementing fault-tolerant service using the
state machine aproach: A tutorial. ACM Computing Surveys,
22(4):299–319, 1990.
[27] G. Veronese, M. Correia, A. Bessani, and L. Lung. Spin one’s
wheels? Byzantine fault tolerance with a spinning primary.
In Proc. of the 28th IEEE Int. Symp. on Reliable Distributed
Systems – SRDS’09, 2009.
[28] G. Veronese, M. Correia, A. Bessani, L. Lung, and P. Veris-
simo. Efficient Byzantine fault tolerance. IEEE Transactions
on Computers, 2011.
[29] P. Zielinski. Paxos at war. Technical report, University of
Cambridge Computer Laboratory, 2004.
APPENDIX
In this Appendix we prove the correctness of MOD-
SMART. The first theorem proves the safety of the protocol,
i.e., that all correct replicas process the same sequence of
operations.
Theorem 1 Let p be the correct replica that executed the
highest number of operations up to a certain instant. If p
executed the sequence of operations o
1
, ..., o
i
, then all other
correct replicas executed the same sequence of operations
or a prefix of it.
Proof: Assume that r and r
0
are two distinct correct replicas
and o and o
0
are two distinct operations issued by correct
client(s). Assume also that b and b
0
are the batches of
operations were o and o
0
were proposed, respectively. For r
and r
0
to be able to execute different sequences of operations
that are not prefix-related, at least one of three scenarios
described below needs to happen.
(1) VP-Consensus instance i decides b in replica r, and
decides b
0
in r
0
. Since in this scenario the same sequence
number can be assigned to 2 different batches, this will cause
o and o
0
to be executed in different order by r and r
0
. But
by the Agreement and Integrity properties of VP-Consensus,
such behavior is impossible; Agreement forbids two correct
processes to decide differently, and Integrity prevents any
correct process from deciding more than once.
(2) b is a batch decided at VP-Consensus instance i in
both r and r
0
, but the operations in b are executed in different
orders at r and r
0
. This behavior can never happen because
Algorithm 2 (line 13) forces the operations to be ordered
deterministically for execution, making these operations be
executed in the same order by these replicas.
(3) Replica r executes sequence of operations S =
o
0
, ..., o
s
and r
0
executes a subset of operations in S (but not
all of them), preserving their relative order. This will result
in a gap in the sequence of operations executed by r
0
. From
Algorithm 2, we can see that any operation is executed only
after the VP-Decide event is triggered. This event is triggered
either when a consensus instance decides a batch in line 7 —
which occurs during the normal phase — or when invoked
by Algorithm 3 in line 41. For simplicity, let us assume that
each batch of messages contains a single operation. In the
absence of a synchronization phase, lines 3-6 of Algorithm
2 ensure that any consensus instance i is only started after
instance i − 1 is decided. This forces any correct process to
execute the same sequence of operations.
Lets now reason about the occurrence of a synchronization
phase. In such case, r
0
will create the Log set at Algorithm
3, and then trigger the Decide event for each decision
contained in Log (lines 36-41). Log is created using
operations from both the most up-to-date log contained
in the SYNC message or from the replica’s DecLog
(line 36). Let us assume that r
0
did not execute S before
entering the synchronization phase. Let us further consider
T = {o
s+1
, ..., o
t
} with t ≥ s + 1 to be a sub-sequence
of operations that have been executed by r. For r
0
to
skip S in this situation, it is necessary that Log contains
U (such that U is a prefix of T ) but does not contain
S, and that r
0
triggers VP-Decide at Algorithm 3 (line
41) for each operation in U. This situation can never
happen since r
0
is correct, and the algorithm ensures Log is
constructed using valid operations (satisfying validDec)
from decision logs that contain no gaps, i.e., satisfy the
noGaps predicate. Furthermore, each decision in Log also
satisfied the validDec predicate, so r
0
will not pick a
sequence of operations with invalid decisions. Finally, since
r
0
is correct, DecLog will already satisfy these predicates.
This means that either: (1) both S and U are in Log; (2)
only S is in Log, (3) neither sequence is in Log. Therefore,
if Log contains U, then it must also contain S, and both
sequences will be executed in r
0
.
Next lemmata prove several MOD-SMART properties.
These lemmata use the following additional definitions. We
say that an operation issued by a client c completes when c
receives the same response for the operation from at least
f + 1 different replicas. We also consider that an operation
sent by a client is valid if it is correctly signed and if its
sequence number is greater than the sequence number of
the last operation sent by that client.
Lemma 1 If a correct replica receives a valid operation o,
eventually all correct replicas receive o.
Proof: We have to consider four possibilities concerning the
client behavior and the system synchrony.
(1) Correct client and synchronous system. In this case,
the client will send its operation to all replicas, and all
correct ones will receive the operation and store it in the
ToOrder set before a timeout occurs (Algorithm 2, line 1-2
plus procedure RequestReceived).
(2) Faulty client and synchronous system. Assume a faulty
client sends a valid operation o to at least one correct replica
r. Such replica will initiate a timer t and start a consensus
instance i (Algorithm 2, lines 1 and 2 plus procedure
RequestReceived). However, not enough replicas (less than
n − f) will initialize a consensus instance i. Because of
this, the timeout for t will eventually be triggered on the
correct replicas that received it (Algorithm 3, line 1), and
o will be propagated to all other replicas (lines 2 and 3).
From here, all correct ones will store the operation in the
ToOrder set (Algorithm 2, lines 18 and 19 plus procedure
RequestReceived).
(3) Correct client and asynchronous system. In this case,
a correct replica might receive an operation, but due to
delays in the network, it will trigger its timeout before the
client request reaches all other replicas. Such timeout may
be triggered in a correct replica and the message will be
forwarded to other replicas. Moreover, since the client is
correct, the operation will eventually be delivered to all
correct replicas and they will store it in their ToOrder set.
(4) Faulty client and asynchronous system. This case is
similar to 3), with the addition that the client may send
the request to as few as one correct replica. But like it
was explained in 2), the replica will send the operation
to all other replicas upon the first timeout. This ensures
that eventually the operation will be delivered to all correct
replicas and each one will store it in the ToOrder set.
Therefore, if a correct replica receives a valid operation
o, them all correct replicas eventually receive o.
Lemma 2 If a synchronization phase for regency g starts
with a faulty leader l, then eventually synchronization phase
for regency g
0
> g starts with correct leader l
0
6= l.
Proof: Each synchronization phase uses a special replica
called ‘leader’, that receives at least n − f STOPDATA
messages and sends a single SYNC message to all replicas
in the system (Algorithm 3, lines 24-29). If such leader is
faulty, it can deviate from the protocol during this phase.
However, its behavior is severely constrained since it can not
create fake logs (such logs are signed by the replicas that
sent them in the STOPDATA messages). Additionally, each
entry in the log contains the proof associated with each value
decided in a consensus instance, which in turn prevents the
replicas from providing incorrect decision values. Because
of this, the worst a faulty leader can do, is:
(1) Not send the SYNC message to a correct replica. In
this case, the timers associated with the operations waiting to
be ordered will eventually be triggered at all correct replicas
- which will result in a new iteration of the synchronization
phase.
(2) Send two different SYNC messages to two different
sets of replicas. This situation can happen if the faulty
leader waits for more than n − f STOPDATA messages
from replicas. The leader will then create sets of logs L
and L
0
, such that each set has exactly n − f valid logs,
and sends L to a set of replicas Q, and L
0
to another
set of replicas Q
0
. In this scenario, Q and Q
0
may create
different logs at line 36 of Algorithm 3, and resume normal
phase at different consensus instances. But in order to ensure
progress, at least n − f replicas need to start the same
consensus instance (because the consensus primitive needs
these minimum amount of correct processes). Therefore, if
the faulty leader does not send the same set of logs to a
set Q
n−f
with at least n − f replicas that will follow the
protocol (be them either all correct or not), the primitive
will not make progress. Hence, if the faulty leader wants to
make progress, it has to send the same set of logs to at least
n − f replicas. Otherwise, timeouts will occur, and a new
synchronization phase will take place.
Finally, in each synchronization phase a new leader is
elected. The new leader may be faulty again, but in that
case, the same constraints explained previously will also
apply to such leader. Because of this, when the system
reaches a period of synchrony, after at most f regency
changes, there is going to be a new leader that is correct,
and progress will be ensured.
Lemma 3 If one correct replica r starts consensus i,
eventually n − f replicas start i.
Proof: We need to consider the behavior of the clients
that issue the operations that are ordered by the consensus
instance (correct or faulty), the replicas that start such
instance (correct or faulty), and the state of the system
(synchronous or asynchronous).
We can observe from Algorithm 2 that an instance
is started after selecting a batch of operations from the
ToOrder set (lines 4-6). This set stores valid operations
issued by clients. From Lemma 1, we know that a valid
operation will eventually be received by all correct replicas,
as long as at least one of those replicas receives it. Therefore,
it is not necessary to consider faulty clients in this lemma.
From the protocol, it can be seen that a consensus instance
is started during the normal phase (Algorithm 2, line 6).
Following this, there are two possibilities:
(1) r decides a value for i before a timeout is triggered.
For this scenario to happen, it is necessary that at least n −
f processes participated in the consensus instance without
deviating from the protocol. Therefore, n − f replicas had
to start instance i.
(2) A timeout is triggered before r is able to decide a
value for i. This situation can happen either because the
system is passing through a period of asynchrony, or because
the current leader is faulty. Let us consider a consensus
instance j such that j is the highest instance started by a
correct replica, say r
0
. Let us now consider the following
possibilities:
2-a) r started i and i < j. Remember that our algorithm
executes a sequence of consensus instance, and no correct
replica starts an instance without first deciding the previous
one (Algorithm 2, lines 3-6). If i < j, j had to be started
after i was decided in r
0
. But if i was decided, at least n−f
processes participated in this consensus instance. Therefore,
n − f replicas had to start instance i.
2-b) r started i and i > j. This situation is impossible,
because if j is the highest instance started, and both r and
r
0
are correct, i cannot be higher than j.
2-c) r started i and i = j. In this case, the synchronization
phase might be initialized before all correct replicas start i.
Because only a single correct replica might have started i,
the log which goes from instance 0 to instance i − 1 might
not be present in the SYNC message (sent by Algorithm
3, lines 28-29), even if all replicas are correct (because the
leader can only safely wait for n − f correct STOPDATA
messages). This means that an instance h such that h ≤ i
will be selected by all correct replicas upon the reception of
the SYNC message from the leader.
If the system is asynchronous, multiple synchronization
phases might occur, where in each one a new leader will
be elected. In each iteration, a faulty replica may be elected
as leader; but from Lemma 2, we know that a faulty leader
cannot prevent progress. Therefore, when the system finally
becomes synchronous, eventually a correct leader will be
elected, and h will eventually be started by n − f replicas.
Finally, let us consider the case where h < i. In this
case, a total of n − f replicas may start h instead of i.
But by the Termination property of our primitive, h will
eventually decide, and all correct replicas will start the
next instance. Because of this, eventually n − f replicas
will start i, even if more synchronization phases take place.
Using Lemmata 1-3 we can prove that MOD-SMART
satisfies the SMR Liveness with the following theorem.
Theorem 2 A valid operation requested by a client eventu-
ally completes.
Proof: Let o be a valid operation which is sent by a
client, and I the finite set of consensus instance where o is
proposed. Due to Lemma 1, we know that o will eventually
be received by all correct replicas, and at least one of them
will propose o in at least one instance of I (the fair predicate
ensures this). By Lemma 3, we also know that such instances
will eventually start in n − f replicas.
Furthermore, let us show that there must be a consensus
instance i ∈ I where o will be part of the batch that is
decided in i. As already proven in Lemma 1, all correct
replicas will eventually receive o. Second, we use the fair
predicate to avoid starvation, which means that any operation
that is yet to be ordered, will be proposed. Because of this,
all correct replicas will eventually include o in a batch of
operations for the same consensus instance i. Furthermore,
the γ predicate used in the VP-Consensus ensures that (1)
the operations in the batch sent by the consensus leader is
not empty; (2) it is correctly signed; and (3) the sequence
number of each operation is the next sequence number
expected from the client that requested it.
Since there are enough replicas starting i (due to Lemma
3), the Termination property of consensus will hold, and the
consensus instance will eventually decide a batch containing
o in at least n − f replicas. Because out of this set of
replicas there must be f +1 correct ones, o will be correctly
ordered and executed in such replicas. Finally, these same
replicas will send a REPLY message to the client (line 17,
Algorithm 2), notifying it that the operation o was ordered
and executed. Therefore, a valid operation requested by a
client eventually completes.
